





















Adım (Step) Motorları
1. Giriş
Açısal konumu adımlar
halinde değiştiren, çok hassas sinyallerle sürülen motorlara adım
motorları denir. Adından da anlaşılacağı gibi adım motorları belirli
adımlarla hareket ederler. Bu adımlar, motorun sargılarına uygun
sinyaller gönderilerek kontrol edilir. Herhangi bir uyartımda, motorun
yapacağı hareketin ne kadar olacağı, motorun adım açısına bağlıdır. Adım
açısı motorun yapısına bağlı olarak 90° , 45° , 18° , 7.5° , 1.8°
veya daha değişik açılarda olabilir. Motora uygulanacak sinyallerin
frekansı değiştirilerek motorun hızı kontrol edilebilir. Adım
motorlarının dönüş yönü uygulanan sinyallerin sırası değiştirilerek saat
ibresi yönü (CW) veya saat ibresinin tersi yönünde (CCW) olabilir.
Adım
motorlarının hangi yöne doğru döneceği, devir sayısı, dönüş hızı gibi
değerler mikroişlemci veya bilgisayar yardımı ile kontrol edilebilir.
Sonuç olarak adım motorlarının hızı, dönüş yönü ve konumu her zaman
bilinmektedir. Bu özelliklerinden dolayı adım motorları çok hassas konum
kontrolu istenen yerlerde çok
kullanılırlar. Adım motorlarının kullanıldıkları yerlere örnek olarak,
endüstriyel kontrol teknolojisi içerisinde bulunan bazı sistemler, robot
sistemleri, takım tezgahlarının ayarlama ve ölçmeleri verilebilir.
Ayrıca, adım motorları konumlandırma sistemlerinde ve büro makinaları ile teknolojisi alanında da kullanma alanı bulmaktadır.
Adım motorlarının bu kadar çok kullanılma alanı bulmasının nedeni bu motorların bazı avantajlara sahip omasıdır. Bu avantajlar aşağıdaki gibi sıralanabilir.
-
Geri beslemeye ihtiyaç göstermezler. Açık döngülü olarak kontrol edilebilirler.
-
Motorun hareketlerinde konum hatası yoktur.
-
Sayısal olarak kontrol edilebildiklerinden bilgisayar veya mikroişlemci gibi elemanlarla kontrol edilebilirler.
-
Mekanik yapısı basit olduğundan bakım gerektirmezler.
-
Herhangi bir hasara yol açmadan defalarca çalıştırılabilirler.
Adım motorlarının bu avantajları yanında bazı dezavantajları da aşağıdaki şekilde sıralanabilir.
-
Adım açıları sabit olduğundan hareketleri sürekli değil darbelidir.
-
Sürtünme kaynaklı yükler, açık döngülü kontrolda konum hatası meydana getirirler.
-
Elde edilebilecek güç ve moment sınırlıdır.
2. Adım Motoru Çeşitleri
Kullanımda olan birçok elektrik motorunda olduğu gibi adım motorları da makinanın yapısına ve çalışmasına göre sınıflandırılabilir.
Değişken Relüktanslı (DR) Adım Motoru
Değişken relüktanslı
adım motoru en temel adım motoru tipidir. Bu motorun temel
prensiplerinin daha iyi anlaşılabilmesi için kesit görünüşü Şekil 1’ de
gösterilmiştir. Bu üç-fazlı motorun 6 adet stator kutbu vardır.
Birbirine 180° açılı olan
herhangi iki stator kutbu aynı faz altındadır. Bunun anlamı, karşılıklı
kutupların üzerindeki sargıların seri veya paralel olması demektir.
Rotor 4 adet kutba sahiptir. Stator ve rotor nüveleri genellikle ince
tabakalı silisli çelikten yapılırlar. Düşük manyetomotor kuvveti uygulansa bile, stator ve rotor malzemeleri yüksek geçirgenlikli ve içlerinden yüksek mağnetik akı geçecek kapasitede olmalıdır.
Şekil 1. DR adım motoru
Sabit Mıknatıslı (SM) Adım Motorları
Rotorunda
sabit mıknatıs kullanılan adım motoruna sürekli mıknatıslı adım motoru
adı verilir. 4-fazlı bir SM adım motorunun bir örneği Şekil 2’de
gösterilmiştir. Silindirik sabit mıknatıs rotor gibi çalışır, etrafında
ise herbiri üzerine sargılar sarılı olan 4 adet kutbun bulunduğu stator vardır. 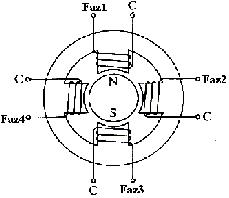
Şekil 2 4-fazlı SM adım motoru
Burada C ile adlandırılan terminal, herbir
fazın birer uçlarının birleştirilerek güç kaynağının pozitif ucuna
bağlandığı ortak uçtur. Eğer fazlar Faz1, Faz2, Faz3, Faz4 sırasıyla
uyartılırsa; rotor saat ibresi yönünde (CW) hareket edecektir. Bu
motorda, adım açısının 90° olduğu açıkça görülmektedir. SM adım
motorunda adım açısını azaltmak için, manyetik kutup sayısı ile birlikte
stator kutup sayısı arttırılmalıdır. Fakat her ikisininde bir sınırı vardır. Buna alternatif olarak küçük adım açılarına sahip karışık yapıdaki SM adım motorları kullanılmaktadır.
Karışık Yapılı (Hybrid) Adım Motoru
Rotorunda sabit mıknatıs bulunan bir diğer adım motoru da karışık yapılı adım motorudur. Hybrid kelimesi motorun sabit mıknatıslı ve değişken relüktanslı motorların prensiplerinin birleşmesinden dolayı verilmiştir. Günümüzde çok geniş bir kullanım alanına sahip olan Hybrid adım motorunun yapısı Şekil 3’te verilmiştir. Statorun nüve yapısı değişken relüktanslı adım motorunun aynısı veya çok benzeridir. Fakat sargıların bağlantısı değişken relüktanslı motorunkinden farklıdır. Değişken relüktanslı
adım motorunda bir kutupta bir fazın iki sargısından sadece bir tanesi
sarılmış iken, 4 fazlı karışık yapılı adım motorunda iki farklı fazın
sargıları aynı kutupta sarılmıştır. Bundan dolayı bir kutup sadece bir
fazın altında değildir. Karışık yapılı adım motorlarında moment, diş
yapılarındaki hava aralıklarının manyetik alanlarının etkileşimi ile
oluşturulur. Bu tip motorlarda sürekli mıknatıs, sürücü kuvveti
oluşturmak için önemli rol oynamaktadır. Fakat karışık yapılı adım
motorundaki rotor ve stator dişlerinin küçük adım açıları elde etmek
için dizayn edildiği bilinmelidir.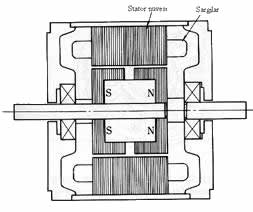
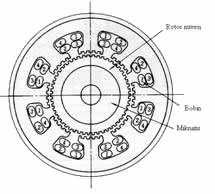
Şekil 3. Karışık yapılı adım motorunun yapısı
3. Adım Motorlarına Ait önemli Parametreler
Çözünürlük
Çözünürlük;
bir devirdeki adım sayısı veya dönen motorlar için adım açısı (derece),
lineer motorlar için ise adım uzunluğu (mm) olarak tanımlanır. Bu sabit
değer, üretim sırasında tesbit edilen bir büyüklüktür. Bir adım
motorunun adım büyüklüğü, çeşitli kontrol düzenleri ile
değiştirilebilir. Yarım adım çalışmada adım büyüklüğü normal değerinin
(çözünürlüğünün) yarısına indirilir.
Doğruluk
Bir adım motorunun adım konumu, tasarım ve üretim sırasında biraraya
getirilen birçok parçanın boyutları ile belirlenir. Bu parçaların
boyutlarındaki toleranslar ve dahili sürtünmeler adımların nominal denge
konumlarında da toleranslara neden olurlar. Bu durum adım motorunun
doğruluğu olarak isimlendirilir ve belli bir konumdaki maksimum açısal
hatanın nominal tek adım değerinin yüzdesi olarak ifade edilmiş halidir.
Klasik adım motorlarında bu hata % ± 1 ile % ±
5 arasında değişmektedir. Sürtünme momenti veya kuvveti nedeniyle
oluşan konum hataları bu doğrulukla ilgisi olmayan, daha az veya çok
olabilen rastgele hatalardır. Ancak her iki tip hata toplanarak sistemin toplam hatası elde edilir.
Tutma momenti
Tutma momenti, bir adım motorunun en temel moment karekteristiğidir.
Tutma momenti eğrisi, motorun ürettiği tutma momentinin rotor konumuna
bağlı olarak değişimini veren eğridir. Eğrinin merkezi motorun bir
fazının uyartılmış olduğu durumda rotorun kararlı adım konumuna karşılık
düşer. Bu eğri, rotor adım pozisyonundan uzaklaştırılırsa, motorda endüklenecek
olan ve rotoru sıfır momentli adım pozisyonuna geri getirmeye çalışan
momentin (tutma momenti) yönünü ve miktarını verir . Tutma momenti
eğrisi, motorun tüm rotor konumları ve statik uyarma koşullarındaki ani
momentini tam olarak tanımlamak için gereklidir. Diğer moment karakterisitikleri (statik ve dinamik) bu eğri baz alınarak elde edilebilir.
Tek adım tepkisi
Motor
fazlarından biri uyarılmış durumdaysa motor kararlı bir adım
konumundadır. Bu fazın uyartımı kesilip yeni bir faz uyartılırsa motor
bir adım atacaktır. Rotor konumunun zamana göre bu değişimi tek adım
tepkisi olarak tanımlanır. Tek adım tepkisi, motorun adım hareketinin
hızını, tepkinin aşım ve salınım miktarını, adım açısının hassaslığını
veren önemli bir karekteristiktir. Adım motorlarından maksimum performans elde edebilmek için tek adım tepkisindeki aşım ve salınımların azaltılması ve yerleşme zamanının kısaltılması gerekmektedir. Bu nedenle tek adım tepkisinin iyileştirilmesi adım motorlarının kontrolunda çok büyük öneme sahiptir.
Sürekli rejimde maksimum yük momenti eğrisi
Sürekli
rejimde maksimum yük momenti/ hız eğrisi herhangi bir sabit dönüş
hızında, rotor hareketinin giriş darbe dizisiyle olan senkronizasyonunu
bozmadan ve rotorun durmasına neden olmadan sürekli halde motor miline
uygulanabilecek maksimum yük momentini verir. Bu moment aynı zamanda, sözkonusu hızda motorda meydana gelecek maksimum moment anlamına da gelmektedir. Klasik motorlarda bu eğriye karşılık gelebilecek bir karekteristik
yoktur. Maksimum yük momenti eğrisi çalışma noktalarını göstermediği
gibi bir transfer fonksiyonu eğrisi de değildir. Sadece, çalışma
bölgesini sınırlar. Bu eğrinin sınırladığı bölge içinde herhangi bir
noktada motor giriş darbe dizilerini kaybetmeden ve durma tehlikesi
olmadan ilgili hız ve yük momenti ile çalışır. Sınırların dışına
çıkıldığında bu durum değişebilir.
Kalkışta maksimum yük momenti eğrisi
Özellikle
açık döngülü sistemlerde duran bir sistemi istenen pozisyona
getirebilmek için motora uygulanan uyartım darbelerinin motor tarafından
hiç kaçırılmadan takip edilmesini sağlamak çok önemlidir. Fakat,
uygulanan uyartım sinyallerin sıklığı, motorun miline bağlı yükü sıfır
hızından itibaren kaldırıp hızlandırmasına izin vermeyebilir. Bu yüzden
adım motorları için, kalkışta maksimum yük momenti eğrileri tanımlanır.
Şekil 4’ te sürekli rejimde maksimum yük momenti ve kalkışta maksimum yük momenti eğrileri gösterilmiştir.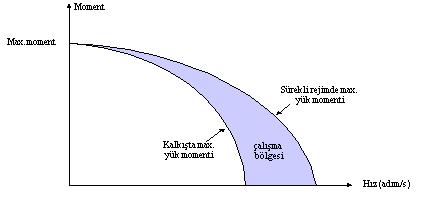
Şekil 4 Sürekli rejimde ve kalkışta max. yük momenti/hız eğrileri
Adım Motorlarının Uyartımı
Tek-faz uyartımı
Motor
sargılarının sadece birinin uyartıldığı uyartım cinsine tek-faz
uyartımı adı verilir. Çizelge1’de 4-fazlı adım motoru için tek-faz
uyartım sırasındaki fazların durumu görülmektedir. Bu uyartım metodunda
rotor her bir uyartım sinyali için tam adımlık bir hareket yapmaktadır.
Uyartım dönüş yönüne bağlı olarak sıra ile yapılır. Burada fazların
uyartım sırası saat ibresi yönündeki (CW) dönüş için F1, F2, F3, F4,
saat ibresinin tersi yönü (CCW) için F4, F3, F2, F1 şeklindedir.
İki-faz uyartım
Motor
sargılarının ikisinin sıra ile aynı anda uyartıldığı uyartım cinsine
iki-faz uyartımı adı verilir. Çizelge 2’ de 4-fazlı adım motoru için
iki-faz uyartım sırasındaki fazların durumu görülmektedir. İki faz uyartımlıda rotorun geçici durum tepkisi tek-faz uyartımlıya göre daha hızlıdır. Fakat burada güç kaynağından çekilen güç iki katına çıkmaktadır.
Çizelge 1. Tek-faz uyartımın faz uyartım sıralaması
| Adım | R | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Faz 1 | x | |
|
|
x | |
|
|
x |
| Faz 2 | |
x | |
|
|
x | |
|
|
| Faz 3 | |
|
x | |
|
|
x | |
|
| Faz 4 | |
|
|
x | |
|
|
x | |
Çizelge 2. İki-faz uyartımın faz uyartım sıralaması
| Adım | R | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Faz 1 | x | x | |
|
x | x | |
|
x |
| Faz 2 | |
x | x | |
|
x | x | |
|
| Faz 3 | |
|
x | x | |
|
x | x | |
| Faz 4 | x | |
|
x | x | |
|
x | x |
Karma uyartım
Bu uyartım yönteminde tek-faz uyartımı ile iki-faz uyartımı ardarda uygulanır. Burada rotor herbir uyartım sinyali için yarım adımlık bir hareket yapmaktadır. Çizelge 2.3’ te fazların uyartım sırası görülmektedir. Bu uyartım metodunda adım açısı yarıya düştüğünden adım sayısı iki katına çıkmaktadır.
Çizelge 3. Yarım adım (karma) uyartımın faz uyartım sıralaması
| Adım | R | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Faz 1 | x | x | |
|
|
|
|
x | x |
| Faz 2 | |
x | x | x | |
|
|
|
|
| Faz 3 | |
|
|
x | x | x | |
|
|
| Faz 4 | |
|
|
|
|
x | x | x | |
4. Adım Motorlarının Denetimi
Açık döngü denetim
Şekil 5’ te
açık döngü denetim için blok diyagramı görülmektedir. Sayısal kontrol
sinyalleri denetleyici tarafından üretilir ve sürücü devre tarafından
yükseltilip adım motorunun sargılarına uygulanır. Eğer denetleyici
olarak mikroişlemci veya bilgisayar kullanılırsa bu elemanların
getirdiği esnekliklerden dolayı aynı denetleyici ile farklı adım
motorları kontrol edilebilir. Kontrol edilecek adım motorları 3, 4 veya
daha farklı faz sayısına sahip olabilir. Ayrıca kullanılacak uyartım
metodu için tek-fazlı, iki-fazlı veya yarım adım uyartımlarından
herhangi biri seçilebilir. Bu uyartım metotlarından hangisinin
kullanılacağı daha önce de açıklandığı gibi motorun kullanılacağı
sisteme bağlıdır.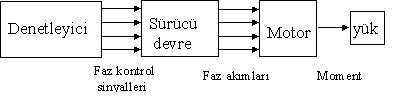
Şekil 5. Açık döngülü denetim
Denetleyici tasarlanırken motorun cinsi ve yükün durumu gözönünde
bulundurulmalıdır. Bu sırada meydana gelen sınırlamalar kalıcı veya
geçici durum sınırlamaları olabilir. Açık döngülü denetimde motorun
konumu bilinmediğinden dolayı motorun gönderilen bütün adım komutlarını
yerine getirdiği varsayılmaktadır. Eğer uyartım hızı çok yüksek ise,
motor adım komutlarından bir kısmını yerine getiremeyebilir. Bu durumda
kalıcı bir hata meydana gelir. Bu tür hataların meydana gelmemesi için
motor yükünün en büyük olduğu durum göz önüne alınarak hata yapılmayan
en yüksek hız belirlenip, bu hızın üzerindeki hızlarda uyartım
yapılmamalıdır.
Kapalı Döngü Denetim
Kapalı
döngü sistemlerde ani rotor konumu sezilerek denetim birimine iletilir.
Her adım komutu için bir önceki komutun gerçekleştirildiği adım bilgisi
alınarak uygulanır. Bu nedenle motor ile denetleyici arasında herhangi
bir adım kaybı olmaz. Kapalı döngü denetime bir örnek Şekil 6’da
gösterilmiştir. 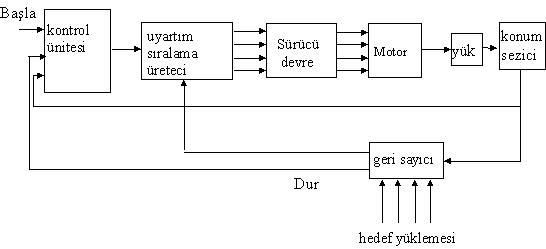
Şekil 6. Adım motorunun kapalı döngülü denetimi
İlk
olarak geri sayıcıya hedef konum yüklenir. Daha sonra başla komutu
verilerek adım komutlarının sıralayıcıya uygulanması sağlanır. Adım
komutlarına bağlı olarak motor adım hareketi yapmaya başlar. İlk adım
tamamlanınca, konum sezici geri sayıcıyı ve denetim birimlerini uyarır
ve geri sayıcı değeri bir azalır. Eğer bu denetim açık döngülü
yapılırsa, geri sayıcı adım komutlarının sayısını yine saklar fakat
komutun uygulanıp uygulanmadığı bilinmez. Konum sezici, denetim birimine
yeni adım komutu üretimi için sinyal gönderir. Ağır yükler için adım
komutları arası sürenin daha büyük olması nedeniyle adım komutlarının ard
arda gelmesi istenmez. Yüke göre hız ayarlaması yapılır ve motor hedef
konuma gelene kadar bu olaylar tekrarlanır. Adım motoru hedef konuma
gelince denetim birimi dur komutu ile uyarılarak yeni adım komutu
üretilmesi engellenir .Kapalı döngü sistemi, adım motorunu yük durumunu
da göz önüne alarak uyartım sürelerini ayarlar ve en uygun hız
profilinde çalıştırır.
5. Adım Motoru Sürücü Sistemleri
Şekil 7’ de bir adım motoru için gerekli olan sürücü devrenin blok diyagramı gösterilmiştir. Şekil 7.a’ da motorun lojik sıralayıcısı, Şekil 7.b’ de ise giriş kontrolörü gösterilmiştir.
a)Lojik sıralayıcının motora bağlantısı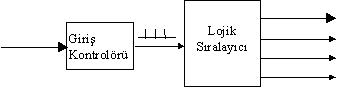
b) Giriş kontrolörü
Şekil 7. Adım motoru sürücü sisteminin blok diyagramı
Lojik Sıralayıcı
Bu sistemde lojik sıralayıcı giriş kontrolöründen aldığı sinyali faz sayısına uygun sıralayarak motorun dönmesini sağlar. Sıralayıcı genellikle shift-register, NAND (ve değil), NOR( veya değil), NOT( değil) gibi lojik kapılardan oluşturulur. Özel amaçlı sıralayıcı için, J-K flip flop entegreleri ve lojik kapıların uygun kombinasyonları uygulanabilir. J-K flip-flop ve çeşitli lojik kapılar kullanılarak elde edilen sıralama devresi Şekil 8’de ve bu devrenin ürettiği sinyaller Şekil 9’ da gösterilmiştir.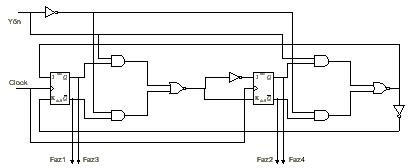
Şekil 8. 4-fazlı adım motoru için lojik sıralayıcı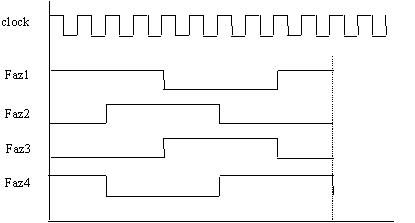
Şekil 9. Lojik sıralayıcının ürettiği sıralama
Sürücü devre
4-fazlı bir adım motorunu sürmek için örnek sürücü devre Şekil 10’ da gösterilmiştir. Adım motoru 4-fazlı karışık yapılı (Hybrid) adım motoru olup tam-adım ve her adımda iki faz uyartımlı olacak şekilde sürülmektedir. Sargıların uyartımı için her faza darlington çifti ve koruma diyotu içeren güç transistörleri
kullanılmıştır. Motorların çalışması için gerekli olan enerji DA güç
kaynağından sağlanmaktadır. Normalde 4-fazlı motorun sürülmesi ve
fazların sırayla enerjilenmesi için mikroişlemci yada bilgisayardan 4-bitlik sinyal elde etmek gerekmektedir. Burada ise fazların sıralanması lojik sıralayıcı kullanılarak sağlanmıştır. Böylece her bir motor için 4-bitlik çıkış yerine 2-bitlik bilgi yeterli olmaktadır. Lojik sıralayıcının sıralama yapması için bir clock
sinyaline bir de yön sinyaline gerek vardır. Bilgisayar veya
mikroişlemcinin yön sinyali çıkışı 1 seviyesinde ise motor ileri, 0
seviyesinde ise geri yönde dönmektedir. 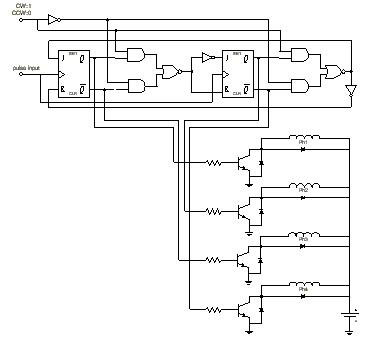
Şekil 10 4-fazlı adım motoru sürücü devresi
Şekil 11 Bipolar Step Motor Yapısı ve Adım Sırılaması
Şekil 12 AEG PLC için Bağlantı Şeması
1 ( mavi ) 2 ( Kırmızı ) 3 ( Beyaz ) 4 ( Sarı )
+  - -
- -
1 6
3 8
4 7
2 5
UE1 UNE2
OM1 UM1
UNE2 UNT1
=M1 =A6
UNE2 UNE2
UM1 UM1
UNT1 UNT2
=A1 UT1
UNE2 =A7
UM1 UNE2
UNT4 UM1
=T1 UNT3
UNE2 UT2
UM1 =A5
UNT2 UNE2
UT1 UM1
=A4 UT3
UNE2 =A8
UM1 PE
UT1
=T2
UNE2
UM1
UNT3
UT2
=A2
UNE2
UM1
UT2
=T3
UNE2
UM1
UT3
=A3
UNE2
UM1
UT3
=T4
Yorumlarınız
neyse hocam bana bilgi verirseniz sevinirim .
ok
kib
(NOT : ALINTI YAPILDIĞI SÖYLENEN SİTE :http://www.wekatronik.com/step_motor.asp)
Teşekkür ediyorum.
sevgi ve saygılarımla
Bir yorum ekleyin
İzin verilen html etiketler (tag): <p><div><b><strong><i><u><del><hr><sup><sub><br>
